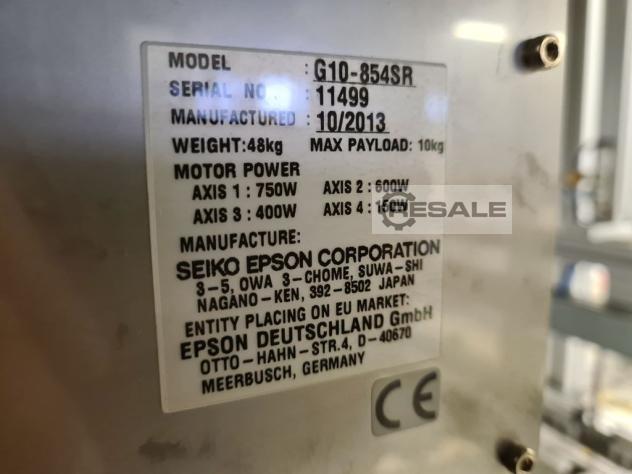
Epson G10-854SR Robot Screwdriving Station Estación de dosificación
Montaje de piezas para radios de automóviles y sistemas de
navegación y para probarlos.
La estación de montaje está diseñada como un marco cerrado de
aluminio con un marco de soldadura de acero insertado y tiene un
diseño muy compacto.
Los armarios de control y los terminales de las válvulas están
integrados en el sistema.
Todos los procesos de movimiento durante el funcionamiento del sistema
se pueden rastrear en todos los lados a través de grandes ventanas y
puertas.
El funcionamiento es a través de una pantalla táctil.
La estación de ensamblaje se divide en subestaciones 3.1 área de
dosificación, 3.2 área de ensamblaje
KK+SW y área de montaje frontal 3.3. (KK=disipador de calor,
SW=ángulo del mamparo)
Los pasos de trabajo de acuerdo con estas áreas de ensamblaje se
describen a continuación:
St.3.1: Rango de dosificación
- un WT con chasis adjunto y placas de circuito impreso entra en el
área de dosificación a través de la correa de transferencia.
- esto se detiene en la unidad de posicionamiento de carrera (HuPo) y
se levanta de la correa y se fija
- ahora el manejo x-y-z moverá el cabezal de dosificación a la
ubicación prevista y comenzará el proceso de dosificación.
- después de completar la dosificación exitosa, el manejo se mueve
sobre la posición de reposo y el WT se coloca en la correa
- Transporte adicional al área de ensamblaje KK + S \ WV (requisito
previo no WT en la posición de ensamblaje)
La cantidad de dosificación se puede seleccionar en el control del
dispensador (Scheugenpflug) y a través del PLC dependiendo de la
posición
Las posiciones se pueden ver a través del panel de control
St.3.2: Área de montaje KK+SW
- a través de la cinta de transferencia, un WT va desde el área de
dosificación hasta el área de ensamblaje KK + SW.
- esto se detiene en la unidad de posicionamiento de carrera (HuPo),
se levanta de la correa y se fija, mientras que las paredes laterales
del chasis del conjunto parcialmente ensamblado están alineadas
- al mismo tiempo se realiza el posicionamiento de la bandeja KK y la
bandeja SW
- una pila de bandejas KK (12) y una pila de bandejas SW (12) se
colocan manualmente fuera de la carcasa protectora en la cinta de
alimentación respectiva
- se abren los dos mamparos de seguridad y las pilas de bandejas
cargadas se ejecutan en la posición de agarre de la carretilla
elevadora respectiva
- Los dos mamparos de seguridad se cierran de nuevo
- las pinzas respectivas agarran la bandeja correspondiente
- con el eje Z se produce la separación de la bandeja y el transporte
hacia arriba (sobre la altura real de la retirada)
- para el centrado y la estabilización de la bandeja, se empuja un
soporte de centrado y se coloca debajo de la bandeja respectiva
mediante x-handing.
- con el eje z de la carretilla elevadora, la bandeja respectiva se
coloca en la almohadilla de centrado correspondiente
- las bandejas están listas para la extracción de los componentes
- con la pinza múltiple en el robot Scara, el KK se agarra en la
bandeja y se coloca en una posición intermedia como ayuda de
alineación (para lograr imprecisiones al recoger de la posición de
agarre faltante para el montaje)
- El KK se escanea, se toma de nuevo y se instala en el WT si el
resultado del escáner es correcto
- el n.i.O. KK se almacena en una caja K5327004 n.i.O.
- la pinza múltiple en el robot Scara luego agarra el SW en la
bandeja y lo coloca en la posición de alineación
- el SW se toma de nuevo y se instala en el WT
- continuar con el área de montaje frontal
- si las bandejas proporcionadas están vacías, se almacenan en la
cinta de rechazo correspondiente
- a tal fin, las carretillas elevadoras se colocan en consecuencia por
medio de ejes x
- Las bandejas vacías sólo se rechazan cuando se han procesado las
pilas de bandejas completas
- se abren los mamparos de seguridad correspondientes y se descargan
las pilas de bandejas vacías para su extracción manual
- Los dos mamparos de seguridad se cierran de nuevo
St.3.3: Área de montaje frontal
- el frente está colocado en el WT circunferencial en un nido
separado
- con la pinza múltiple en el robot Scara, la parte delantera se
retira del WT equipado con KK y SW en el área de ensamblaje KK + SW
- la parte delantera está colocada en el nido de una unidad de
montaje
- el WT pasa por encima de la correa de transferencia desde el área
de ensamblaje KK + SW hasta el área de montaje delantera y se detiene
por la unidad de posicionamiento del cubo, se levanta de la correa y
se fija, mientras que el chasis se mantiene presionado
- el frente posicionado está unido por un movimiento de elevación
giratorio en el WT
- después de completar el ensamblaje frontal exitoso, la unidad de
ensamblaje se mueve a la posición inicial y el WT es


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}


 Alemania
Alemania